Attitude Control of a 1D Dalancing Bot
Published:
Summary of Work
- Engineered a 1 DoF device with drone-like dynamics and actuation to create a platform for teaching control systems
- Implemented an optimal controller with constrained half-plane command space and over-actuation to maximize agility
- Devised a programming guide, 3 tests, safety protocols, and modular project structure, enhancing learning experience
Repository
Overview
This project explores attitude control through the design and implementation of a 1D balancing robot. The project combines mechanical design, control theory, and embedded systems to achieve real-time stability. This project was motivated at developing a teaching platform for control systems. It was guided by Prof. Vivek Sangwan and completed as a part of my Bachelor’s Thesis at IIT Bombay.
Control Algorithm
A PD controller was developed to regulate the angle of the bot, using real-time IMU feedback.
The key highlights of the controller includes:
- Saturation functions to prevent infeasible thrust commands
- Power optimization to reduce unnecessary energy use
- Stability filtering ensuring continuous operation within safe regions
Simulation & Testing
Simulations validated the control algorithm for setpoint and sinusoidal trajectory tracking. A static thrust test characterized motor-propeller performance, showing up to 500g thrust with 1045 propellers. Final implementation used 8045 props for safer operation.
🎥 Watch the demonstration on YouTube
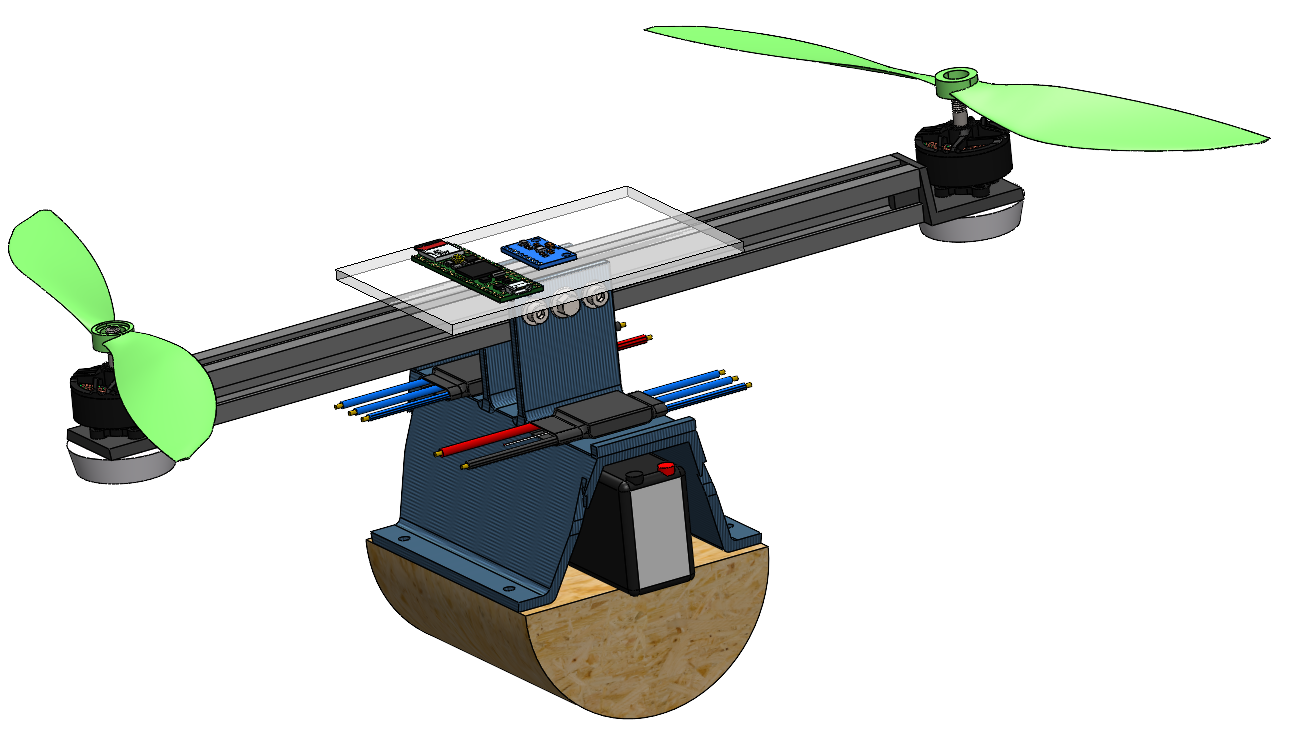
Mechanical Design
The bot was modeled as a two-link structure pivoting about a single contact point.
Key Components:
- Frame: Aluminum 2020T profiles — lightweight and rigid
- Contact Surface: Rubber-coated cylinder for friction and vibration damping
- Actuation: Dual BLDC motors with propellers providing differential thrust
- Electronics: Teensy 4.1 microcontroller, MPU6050 IMU, SimonK 30A ESCs
- Power: External regulated supply for classroom safety and consistency
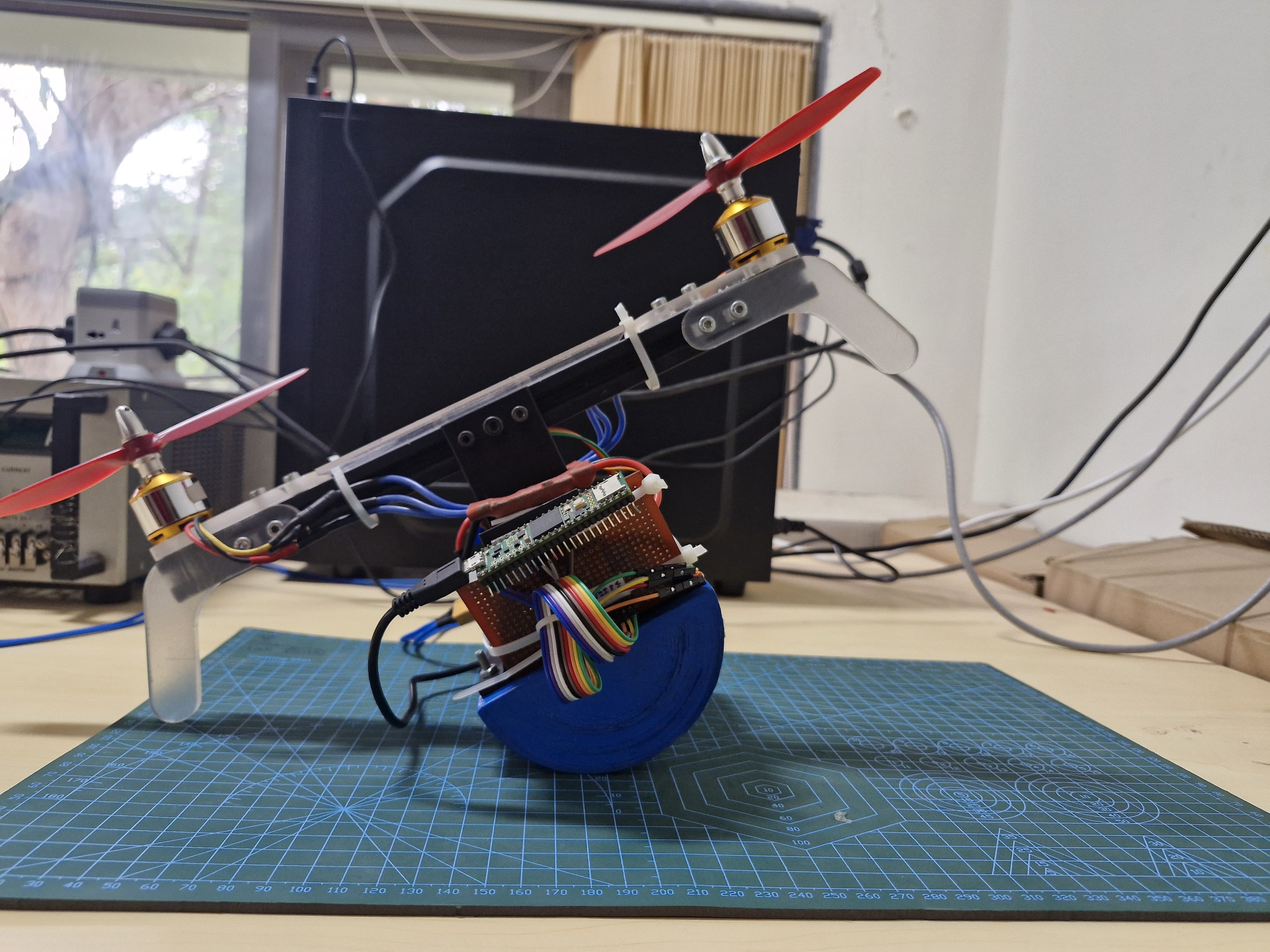
All components were designed in SolidWorks, and custom mounts were 3D-printed using PLA and laser-cut acrylic.
CAD
Fabricated Model
Tools & Skills
Software: SolidWorks, MATLAB/Simulink, Arduino IDE
Hardware: Teensy 4.1, MPU6050, BLDC motors, ESCs
Concepts: Control systems, state-space modeling, mechatronics integration, embedded systems